Combat Robotics
Awards
- 30 lb National Champion (February 2025 NHRL, April 2024 NHRL)
- 2nd place 2024 30 lb World Championships
- Highest ranked 30 lb combat robot (as of February 2025)
This project showcases my work in Combat Robotics, where I designed and built a competitive battlebot. The project highlights various achievements, machining techniques, and simulation studies that contributed to the robot's success.
Machining Experience
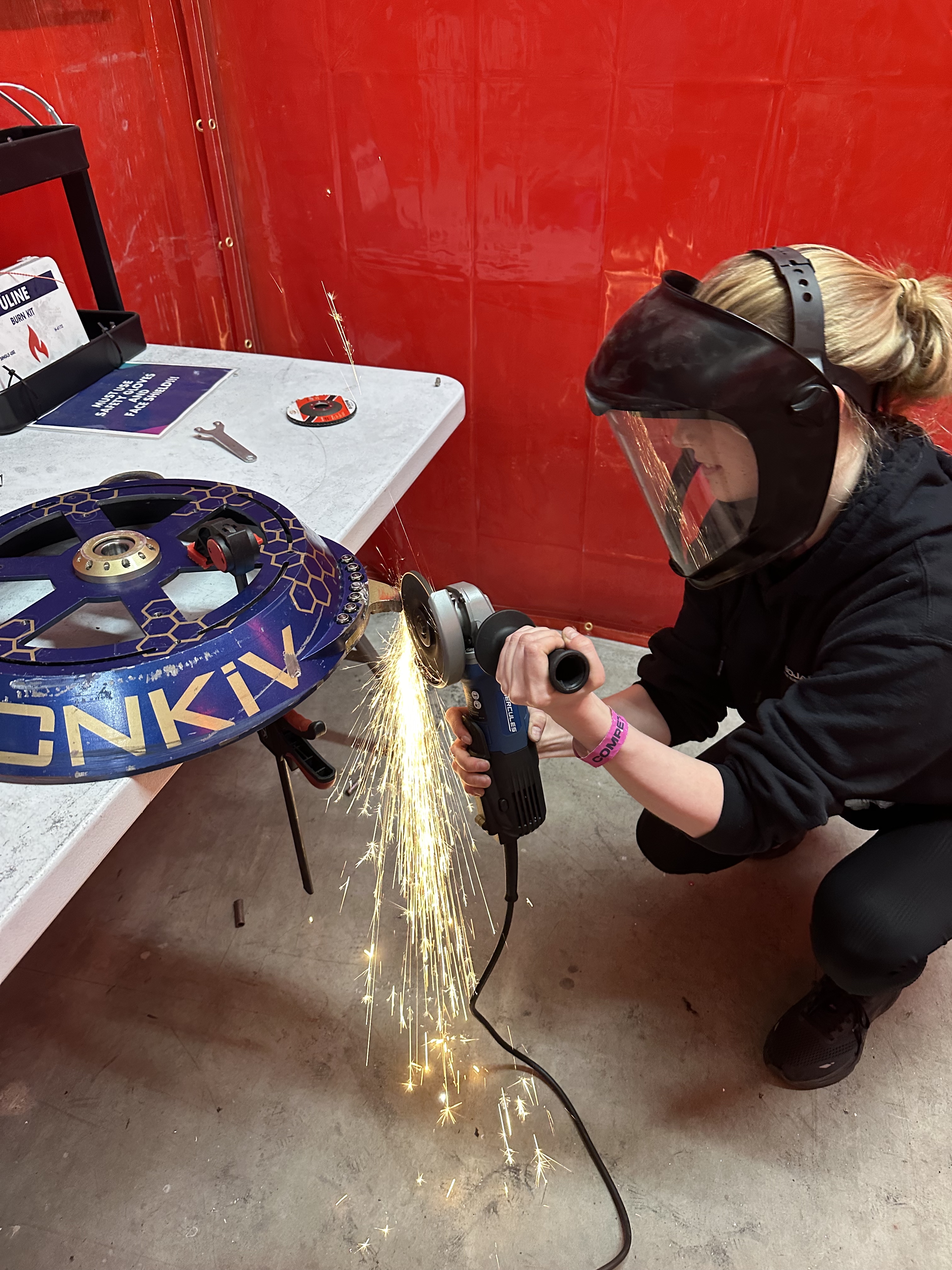
I joined RoboJackets during the third iteration of Chonkiv. Although the early version struggled in competition, I learned essential skills—including lathe work, waterjet cutting, manual milling, and the use of various hand tools—to refine and improve the design. The image at left shows me angle grinding one of our robot's "teeth" in between matches at April 2024 NHRL. This is to resharpen our weapon after it was dulled from hitting our opponent during its prior fight.
Prototyping and Designing for Manufacturing
Throughout my time in Robojackets I learned how to rapidly prototype new ideas, and design them in a way that they can be easily manufactured. Recently, I worked with one other person to create an approximately 0.25x scale prototype of our next 18 lb robot, (major adjustments had to be made because some parts such as motors do not scale proportionately). In this project, I designed the chasis and armor system, and my teammate designed the weapon and shuffler system. To help him optimize the parameters for the shuffler design, I created a python simulation which is shown in the software engineering tab on this page. I also learned how to design components for manufacturability, including proper tolerancing and material selection based on the specific machining processes.
Python Design Simulation (Link to the Github)
I developed a Python simulation to optimize shuffler parameters for a new robot that will be competing for the first time in April. This simulation is instrumental in fine-tuning the drive system, ensuring optimal performance. By identifying the stepover of the robot, we can calculate the robot's speed. By identifying the lowest point variance, we can identify how much the robot will "bounce" as it shuffles. In general, it is optimal to have a robot that has a high stepover (speed), and low lowest point variance because this ensures that the robot is more stable and will stay planted in the arena better during weapon hits.
The shuffler system uses offset cams so the robot "walks" instead of rolling.
My Simulation vs Real-world Example
Simulation Parameters
The simulation outputs include the lowest point variance and the 360-degree stepover.
- Lowest point variance: Measures the robot’s vibration as it "walks."
- 360-degree stepover: Indicates the distance traveled per full rotation of the camshaft, affecting speed and motor torque.